Sudarshan Harithas

Email | Google Scholar
CV | GitHub
I’m a third-year PhD student in the Department of Computer Science at Brown University, advised by Prof. Srinath Sridhar. Previously, I graduated from the International Institute of Information Technology Hyderabad (IIIT-H) with an MS in Computer Science, where I worked with Prof. K Madhava Krishna.
Broadly, I am interested in developing general purpose robots that can actively interact with the world and perform a diverse range of tasks. Towards this goal I intend to develop cross-embodied policies that enable autonomous robots to acquire complex behaviors by jointly learning from their own experiences as well as transfer skills from multiple other embodiments.
🔬 Research Focus
-
🧠 Embodiment-Agnostic Representations
Develop representations that minimize the embodiment gap, enabling seamless transfer of manipulation and loco-manipulation skills from humans to robots such as humanoids and multi-fingered dexterous hands. -
🤖 Cross-Embodied Action Generation
Design architectures and learning algorithms for cross-embodiment action generation, allowing skills to generalize across diverse robot morphologies. -
📊 Multi-Embodiment Data Infrastructure
Build scalable data-capture infrastructure for multi-embodiment action datasets.
news
| Dec 13, 2025 | Excited to announce DreamControl-v2 and DreamControl , a scalable generative prior for whole body interaction tasks for huamnoids. |
|---|---|
| Jun 01, 2025 | Started a Summer Internship at General Robotics Excited to work on Humanoid Robots. |
| Apr 01, 2025 | Recognized as a Outstanding Reviewer for CVPR2025 . |
| Jan 27, 2025 | MotionGlot is Accepted at ICRA 2025. |
| Aug 25, 2023 | Started my PhD at Brown CS after graduating from IIIT-H with an MS in CS. |
selected publications
-
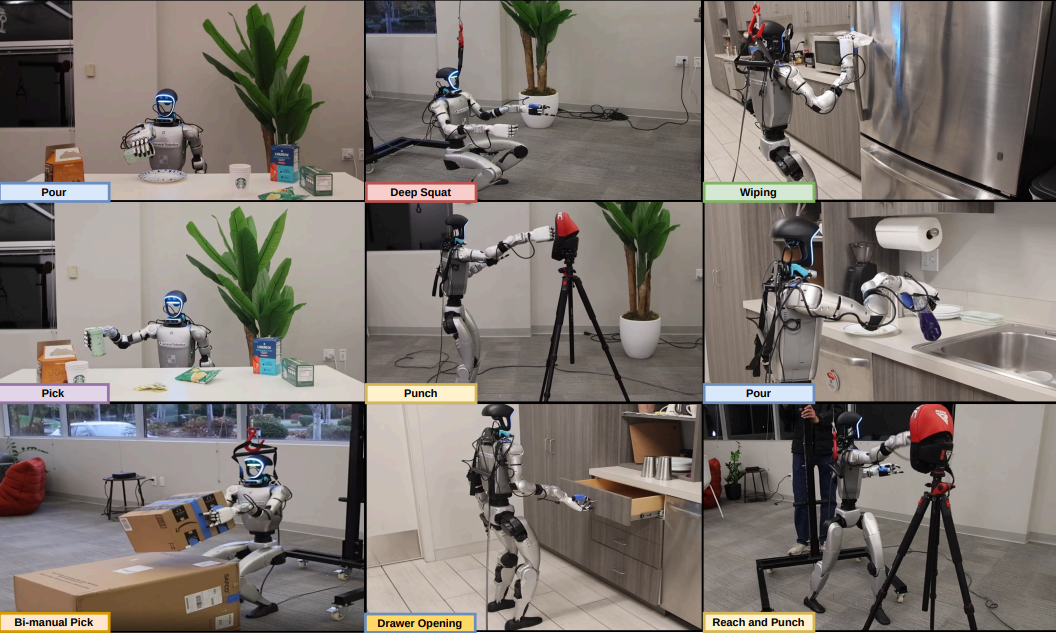 DreamControl-v2: Simpler and Scalable Autonomous Humanoid Skills via Trainable Guided Diffusion Priors.2025
DreamControl-v2: Simpler and Scalable Autonomous Humanoid Skills via Trainable Guided Diffusion Priors.2025