publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
-
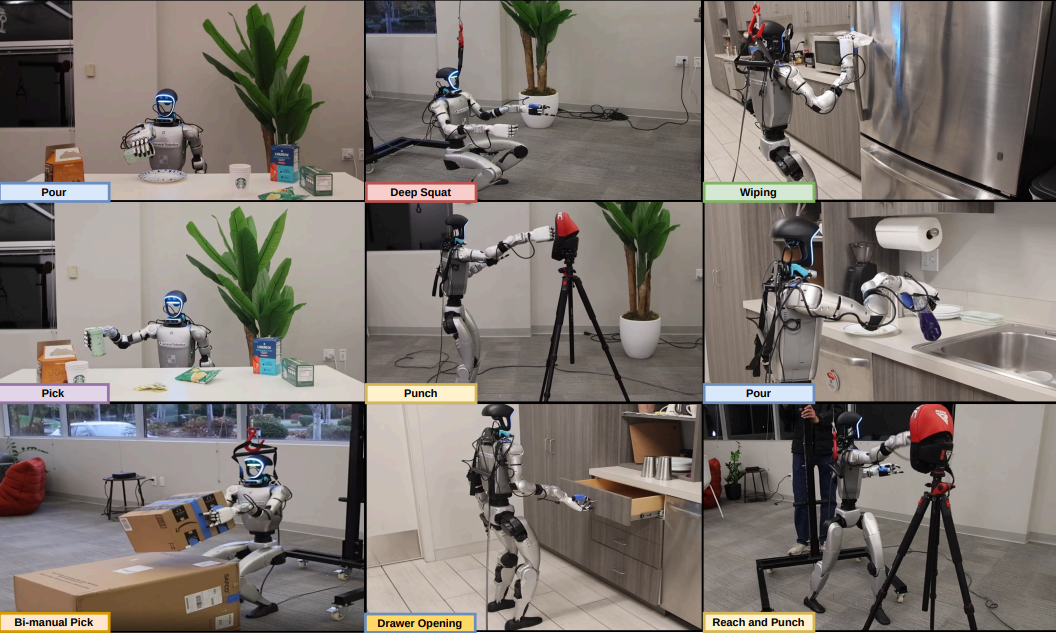 DreamControl-v2: Simpler and Scalable Autonomous Humanoid Skills via Trainable Guided Diffusion Priors.2025
DreamControl-v2: Simpler and Scalable Autonomous Humanoid Skills via Trainable Guided Diffusion Priors.2025
publications by categories in reversed chronological order. generated by jekyll-scholar.